|
(1)ハードウェア構成
| パソコン | PC/AT互換機 | 画面解像度1024×768以上 16bitカラー以上 |
| 市販ロボット | LEGO Spybotics  |
組立式車輪型ロボット(パソコン接続ケーブル付属) 全4タイプのうち、テクノジョー(緑)とスナップトラックス(赤)をそれぞれ10台、計20台使用。 1台につき単3乾電池3本使用。 |
| その他 | 空きペットボトル (500ml) |
ロボット走行、競技の際の障害物として使用。 |
パソコンとロボット間の接続形態は、ケーブルを介した赤外線通信で、シリアルポート(RS-232C)を使用する。ロボットにプログラムを転送するときのみ、このケーブルを接続し、ロボットを動かす際にはケーブルを外して行う。
|
(2)ソフトウェア構成
| OS | Microsoft® Windows98,Me,XP,2000 | いずれかを選択 |
| SDK | LEGO Mindstorms SDK | LEGO社提供 |
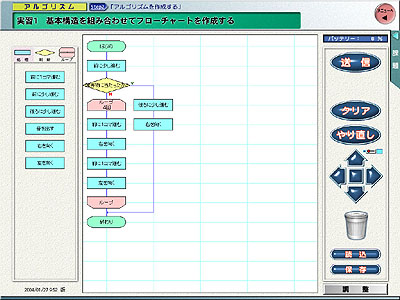
| アプリケーション | ロボットを使ったIT教育教材 | 本研究の成果物 |
ソフトウェア環境は、原則としてWindows95には対応していない。
ただし、教材アプリケーションで、ロボットを直接コントロールせず、プログラミングのみ行い、データを保存する場合は、Windows95配下でも使用することができる。
その場合、作成したデータを、別のWindows98,Me,XP,2000パソコンに渡し、そのパソコンからロボットに転送することになる。
ロボットにプログラムを転送するにあたり、LEGO社提供の「LEGO Mindstorms SDK」をパソコンにインストールしておく必要がある。
(転送モジュールがこのSDKを利用して開発されている)
「LEGO Mindstorms SDK」は、LEGO社のホームページから無償で入手でき、インストーラーの指示に従って簡単にインストールできる。
「ロボットを使ったIT教育教材」アプリケーションは、平成14年度、15年度の成果物をベースとし、小学校向けに、高等学校用課題画面を省略したものを作成し使用した。
ただし、高等学校での実践では、従来の成果物をそのまま利用した。
開発環境は、Macromedia社のDirector8.5を使用している。
|
 |
 |