図1 産業用ロボットアーム MX-150

図2 メドマン社で遠隔操作実験
産業用ロボットアーム遠隔操作
山梨県立甲府工業高等学校 www.kofu-th.ed.jp 電子科教諭 手塚幸樹
teduka@kofu-th.ed.jp
キーワード 光ファイバー網,遠隔操作,ロボット,技術交流,PHS,ビデオサーバ,工業高校
インターネット利用の意図
本課題研究では,ものづくりとネットワークを結び付けた教育テーマの模索を行い,生徒の興味・関心を維持しながら,マルチメディアネットワークを活用して,関連した専門知識やロボットメーカとの技術交流を通して,先進技術を習得できるネットワーク教育例の提案を目的とする。
平成11年度は,光ファイバー網を活用して,工場で稼動しているスタンドアロンの産業用ロボットアーム[図1]を遠隔操作することをテーマに取り組んだ。以下に研究開発した内容と経過を中心に,課題研究の概略と成果を説明する。
1 課題研究の環境
1.1 対象
工業高校電子科3年6名の生徒に,工業科目「課題研究」を1週連続2時間で1年間実施。2学期は,放課後5回ロボットメーカ メドマン社 www.medoman.co.jp で遠隔操作実験[図2]を実施。
|
|
1.2 設備
(1) ハードウェア
・生徒開発用パソコン 富士通FMV x86 Family6 Model 1 64MB 2GB
200MHz PP(10)
・生徒開発用 100VGAnyLANカード アンリツ DN7064(10)
・産業用ロボット Medoman MX-150 可搬重量980N 本体質量14700N 機高2185mm 機幅960mm(1)
・産業用ロボットアームコントローラMedoman RC-24(1)
・産業用ロボットアームサーバ SONY VAIO PCG-C1XE 64MB 8.1GB 266MHz PII(1)
・動画送受信用内臓ビデオカメラ SONY VAIO PCG-C1XE CCD 41万画素(1)
・産業用ロボットアーム接続用PHS LANカード SII MC-6550 PIAFS 64/32Kbps(1)
・産業用ロボットアーム接続用PHS SANYO PHS-J80(1)
・産業用ロボットアーム接続用変換ケーブル I・O DATA RS-232C/USB(1)
・産業用ロボットアーム接続用USB-HUB I・O DATA USB-HB4(1)
・産業用ロボットアームシミュレータ Medoman
(2) ソフトウェア
・生徒開発用OS Microsoft WindowsNT 4.0 Workstation(10)
・産業用ロボットアーム遠隔操作用OS Microsoft Windows98(1)
・Webページ作成 Microsoft Word 97 (10), Microsoft FrontPageExpress(10)
・CG作成ソフト MICROGRAFX Simply3D(1)
・ロボットシミュレーションCG 篠原紀(6)
・Java作成 Microsoft Visual J++ 1.0 (10), Microsoft Visual J++ 1.1(10)
・ロボットコマンドアプレット 森谷洋介(1)
・ロボットコマンド作成 Microsoft Visual C++ 6.0(10), Microsoft Visual Basic 6.0(10)
・ロボットコマンド 藤江良至(6)
・遠隔操作用ブラウザ Microsoft Internet Explorer 4.0(10),Microsoft Internet Explorer
5.0(1)
・遠隔操作用ブラウザ 小泉洋平(1)
・WWWサーバ Microsoft PeerWebServices(10), Microsoft パーソナルwebサーバ(10)
・遠隔操作用WWWサーバ Omnicron Technologies Corporation OmniHTTPdv2.0α6使用期限(1)
・遠隔操作用WWWサーバ 中田昭雄 AN HTTPD1.24(1)
・動画送信用ソフト RealNetworks RealBasicSever(1)
・動画送信用ソフト RealNetworks RealProducer(1)
・動画受信ソフト RealNetworks RealPlayerG2(10)
・電子メール http://www.almail.com/ AL-Mail32(10)
・解凍ソフト 竹村嘉人 Lhasa(10)
・ファイル転送 Ipswitch Inc. WS_FTP Limited Edition(10)
・メーリングリスト 深町賢一 fml(1)
・TV会議ソフト Microsoft NetMeeting3.01(1)
・プレゼンテーション作成ソフト Microsoft PowerPoint97(10)
1.3 ネットワーク
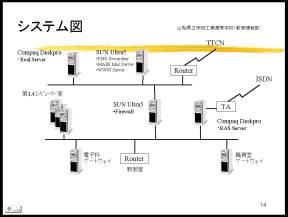
甲府工業高校は平成10~12年度,文部省1.5Mbps光ファイバー専用線による学校ネットワーク活用方法研究開発校に選定され,光ファイバー専用線1.5Mbps帯域を甲府から東京のバックボーンまで接続。産業用ロボットアーム遠隔操作システムは,このネットワークを最大限活用している。校内ネットワーク[図3]は100VGAnyLAN,10・100BASE接続。各サーバ[図4]はSUN Workstation SolarisによるWWWserver,DNSserver,Mailserver,FireWall,RASserver,RealBasicSeverが構築されている。ドメインはkofu-th.ed.jp。管理と運用は教育情報部。
|
|
課題研究の概要
2.1 コンピュータネットワークリテラシーの分野(4月-5月)
OS,インターネットのサービス,Webページ作成,RealPlayerG2等で画像送受信,WWWサーバ等数多くのインターネットの先進的機能を習得。まとめとして,生徒は自作Webページ,電子メール,メーリングリスト等でレポートを作成して,公開。
2.2 Javaアプレット作成の分野(6月-9月)
Web上のオンラインテキスト活用し,Visual J++開発手順,グラフィックス,イベント処理等のJavaアプレットプログラムを作成した。ブラウザやネットワークコマンド等が作成できたことは好ましい傾向。まとめとしてこれらの作品をプログラミングコンテストに出品。
2.3 光ファイバー網を活用した産業用ロボットアーム遠隔操作の分野(10月-1月)
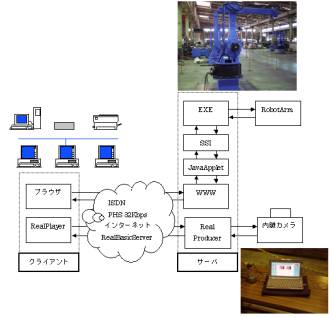
リテラシーとアプレット作成を経て,光ファイバー網を活用した産業用ロボットアーム遠隔操作のシステムの構築を行った。これはWebページにロボットアーム操作の画面を割り付けて,甲府工業高校5F電子情報技術2室のパソコンから,約25km離れた甲西町メドマン社の工場内に設置されている産業用ロボットアームをPHSでインターネット接続して,遠隔操作するシステム。
まとめとして,プログラミングコンテストや課題研究発表会で発表。以下が遠隔操作の学習内容。
(1) 産業用ロボットアーム遠隔操作概要[図5]
(2) 産業用ロボットアーム((a)概要 (b)シミュレーション (b)ネイティブコード (c)コマンド化)
(3) SSIとCGI((a)概要 (b)SSIとロボットアームのコマンド接続)
(4) WWWサーバ((a)AN HTTPD概要 (b)インストール (c)構築運用)
(5) コマンドアプレット((a)Javaアプレットの能力 (b)アプレットとSSIの接続)
(6) 産業ロボットアーム遠隔操作実験[図6]((a)動画送受信 (b)ブラウザ (c)X軸稼動 (d)Y軸 (e)Z軸)
|
|
2.4 交流(1年間)
電子メールやメーリングリストを活用してメドマン社と技術交流を行った。RS-232C/USB変換コネクタのピン配置の確認作業は素早く情報交換ができ,開発に生かせた。専門的な内容や進捗情報はTV会議システムで行い,信頼関係が深まった。Webページレポートでは生徒個人の研究進捗が公開され,知識の共有化がネットワークを通じて図られた。
しかし,現地実習は必要である。現場に行かなければ解決できないことがあった。通信プログラムの出力先やシミュレータの応答情報等,ネットワーク交流では見えない問題が解決できた。
また,本課題研究のメーリングリストに総和工高,神奈川工高等が参加。開発の技術的ヒントや励ましメールをいただいて,大変生徒の励みになった。TV会議システムでの交流実験も行った。
3 課題研究の技術
3.1 ビデオサーバ
RealPlayer,RealProducer,BasicServerを使いインターネット上での動画(ビデオ)の再生,ファイル作成,放送中継等が行えるシステム。このライブ機能で産業ロボットアームの動作を確認する。
3.2 ネイティブコード
スタンドアロンでのロボットアーム操作コマンドはVisual Basicで開発。VBは,Windowsアプリケーションを開発する目的で作られたプログラミング言語。工業高校でもVBは採用され資産も数多い。パソコンのUSBを利用し,ロボットコントローラのRS-232C端子と変換コネクタによりコマンドを送受信して動作させる。生徒は,RS-232Cインターフェイス,USBドライバ,USBハブを介したパソコンとロボットアームの通信プログラムを習得。
3.3 SSI
SSIとはServer Side Includeの略で,この機能を使うとWebページで,ローカルな実行可能プログラムを実行できる。これにより開発した通信プログラムをインターネットで実行できる。生徒は,ローカルなEXEファイルをインターネット上で実行できるSSI機能を習得。
3.4 アプレットとSSI機能の接続
Javaアプレットはローカルな実行可能プログラムを実行できない。しかしインターネット上のURLをオープンすることは容易である。AppletContextクラスのshowDocumentメソッドにURLを渡すだけでよい。これを用いて,ロボットコマンドアプレットを作成。更に,ブラウザのフレーム機能を利用する。画面はふたつのフレームを表示する。左フレームはロボットアームコマンドのリストを表示するJavaアプレット。リストをダブルクリックすると該当するロボットアームコマンドを埋め込んだ.sHTMLファイルを実行して,動作後,結果が右フレームに得られる。
4 産業用ロボットアーム遠隔操作実験 www.kofu-th.ed.jp/robotarm/
4.1 各ソフトウェアのインストール
(1) 動画送信用ソフト RealProducerとRealPlayerG2 (ロボットアームモニタ)
(2) WWWサーバ AN HTTPD 1.24(SSI機能設定)
(3) EXEファイル(ネイティブコードのロボットアームコマンド)
(4) .sHTMLファイル(EXEファイルとSSIコマンドを接続)
(5) ロボットアームコマンドアプレット(URLアクセス)
4.2 遠隔操作実験手順(結果はビデオコンテツ化)
(1) ロボットアームが接続されたWWWサーバ http://RobotServer/ にアクセス
(2) WWWサーバのサービスする遠隔操作タイトルページに開発ブラウザでアクセス
(3) RealPlayerG2起動, rtsp://VideoServer/encoder/rmlive.rm に接続
(4) X500コマンドをダブルクリック
(5) WWWサーバのローカルのEXEファイルが実行
(6) ロボットアームが稼動し,X軸を+500パルス可動
(7) RealPlayerG2でロボットアームのリアルタイム動画がモニタ可能
(8) .sHTMLファイルに埋め込んだ表示結果が確認
5 まとめ
プログラムコンテストや発表会で説明を行うには,知識が整理されている必要がある。生徒は,課題研究を振り返ることで,1年間の学習経過,不明瞭部分,新事実,問題点等の知識の整理ができた。
5.1 まとめの学習内容 www.kofu-th.ed.jp/ml/pro-ml/
(1) プレゼンテーション作成((a)Webページ (b)ビデオ (c)ペーパー (d)パワーポイント)
(2) 研究発表((a)プログラムコンテスト (b)課題研究発表会 (c)メドマン社発表会 (d)評価 (e)課題)
(3) まとめ
5.2 プログラムコンテスト応募状況(結果は未定,タイトルは仮称)
(1) CG部門「ロボットアームCG」3D作成ソフトによるロボットアームシミュレーション作成
(2) プログラム部門「telnet」「ftp」Java言語によるネットワークコマンドtelnet,ftp作成
「ブラウザ」Java言語による閲覧ソフト作成
「ロボットコマンドアプレット」JavaとHTMLによるローカルファイルアクセスソフト作成
(3) 自由研究部門「産業用ロボットアーム遠隔操作システム」概要省略
6 成果
・光ファイバー網を活用した産業用ロボットアーム遠隔操作システムを構築
・アプレット,WWWサーバ,ビデオサーバ,PHSネットワーク等のインターネットの先進機能を習得
・フリーソフトウェアの活用により,安価なシステム構築が可能
・電子メール,Webページ,メーリングリスト,TV会議等で先進技術を習得,知識も共有化
・プレゼンテーションコンテンツの作成を通して,知識が整理
7 結果
プログラミングコンテストやロボットメーカとの技術交流から,課題研究受講生において「産業用ロボットアーム遠隔操作」は,インターネットの先進的機能や専門技術を取り込み,ものづくりのためにインターネットを活用した工業高校の課題研究として好ましいテーマである,と考えられる。
ワンポイントアドバイス |
参加校,協力校等の名称
メドマン株式会社,茨城県立総和工業高等学校,神奈川県立神奈川工業高等学校
参考文献,参考URL,引用等
ネットワークを活用したロボットアーム遠隔操作 手塚幸樹 関東/全国情報技術教育研究会報 99/3
テレロボティクス研究の動向 佐藤知正 日本ロボット学会誌 Vol 11 No6 p777-781 93/9